Reconfigurable Intelligent Surfaces in Cooperative NOMA: A Review of Key Concepts and Applications
M. Ramadevi, Manunuru Naga Sree Lekha*, V. Phanitha Sree and Madha Sai Prashanth Goud
Department of Electronics and Communication Engineering, VNR VJIET, Hyderabad, Telangana, India – 500090
E-mail: ramadevi_ece@vnrvjiet.in; mnslekha@gmail.com; phanithavemulapalli1111@gmail.com; madhasaiprashanth@gmail.com
*Corresponding Author
Manuscript received 06 April 2025, accepted 20 November 2025, and ready for publication 31 December 2025.
© 2025 River Publishers
DOI. No. 10.13052/2794-7254.023
Abstract
The purpose of this survey paper is to provide an overview of the different multiple access techniques, the reason for integrating Reconfigurable Intelligent Surfaces (RIS) with Cooperative Non-Orthogonal Multiple Access (C-NOMA) and the system model of RIS-aided C-NOMA with mathematical equations. The study discusses other 6G technologies and contributes to understanding how RIS-aided C-NOMA together with the other 6G technologies comes close to realizing the goals 6G wireless networks. The paper presents the real-world applications of RIS-aided C-NOMA along with challenges and possible solutions on which upcoming researchers can focus on.
Keywords: 6G wireless communication, cooperative NOMA, energy efficiency, reconfigurable intelligent surface (RIS), successive interference cancellation (SIC).
1 Introduction
Each generation of wireless communication has introduced a new multiple access paradigm – from Frequency Division Multiple Access (FDMA) in 1G and Time Division Multiple Access (TDMA) / Code Division Multiple Access (CDMA) in 2G and 3G, to Orthogonal Frequency Division Multiple Access (OFDMA) in 4G. Although these techniques have progressively improved performance, they fundamentally rely on orthogonality, which inherently limits spectral efficiency and user connectivity. To overcome these constraints, Non-Orthogonal Multiple Access (NOMA) was introduced in 5G systems, allowing multiple users to share the same frequency resources through power-domain multiplexing [1].
Table 1
| Full forms of abbreviations used in the paper | |||
| Abbreviation | Full Form | Abbreviation | Full Form |
| RIS | Reconfigurable Intelligent Surface | C-NOMA | Cooperative Non-Orthogonal Multiple Access |
| FDMA, OFDMA | Frequency Division Multiple Access, Orthogonal Frequency Division Multiple Access | TDMA, CDMA | Time Division Multiple Access, Code Division Multiple Access |
| DF, AF | Decode-and-Forward, Amplify-and-Forward | SIC | Successive Interference Cancellation |
| AWGN | Additive White Gaussian Noise | MIMO | Multiple Input Multiple Output |
| HD, FD | Half Duplex, Full Duplex | SE, EE | Spectral Efficiency, Energy Efficiency |
While NOMA improves spectral efficiency and supports massive connectivity, its performance is still limited due to far users’ poor channel conditions. In order to address it, Cooperative NOMA extends NOMA by allowing the near users to become relays, which forward the signal to far users, improving coverage and fairness [2]. However, the performance of these C-NOMA systems still degrades under severe channel fading [3], which is addressed by the integration of C-NOMA with RIS. It can dynamically adjust the signal properties to reconfigure the wireless environment, capable of converting non-line-of-sight links into constructive reflective paths [4]. This capability has significantly enhanced the reliability and energy efficiency of cooperative transmissions.
Hence, through this paper, we discuss the basic model of RIS-aided C-NOMA system and explore the different researches on it (see Section 2), see how this technology fits along with other 6G enabling technologies (see Section 3) and the applications of the technology in real world (see Section 4). The conclusion of this paper summarizes the finding and highlights the practical challenges in realizing the system and also suggest potential solutions for future researches to mitigate the challenges (see Section 5). To improve clarity and ease of reading, Table 1 presents the full forms of abbreviations used throughout this paper.
2 The System Model
2.1 RIS and C-NOMA
2.1.1 RIS
RIS is a 2D surface made of an array of programmable reflecting units called meta-atoms which reconfigure the environment properties by adjusting the reflecting signal’s phase, amplitude, frequency and polarization as required. The principle of RIS can be explained via two approaches: physics-based and communication-based. According to physics, beamforming and reflections can be achieved by electrical, thermal or mechanical tuning of surface impedance. In communication terms, a virtual LoS path is created between the base station and the receiving user by the RIS [4]. RIS can be easily installed on walls, advertisement boards and even on moving vehicles. Figure 1 shows the picture of an RIS of order .
RIS is broadly of two types: passive RIS, which does not provide amplification and is used for comparatively shorter distances due to the decrease in capacity gain in certain conditions because of multiplicative fading effect, and active RIS, which amplifies the reflected signal and is best suited for long distance communication, though it consumes more power and introduces noise [5]. Next, we discuss about C-NOMA.
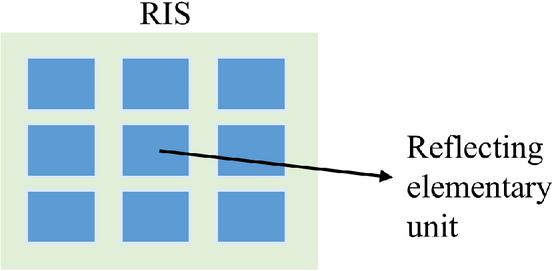
Figure 1 RIS of Order , = 9.
2.1.2 C-NOMA
C-NOMA enhances spectral and energy efficiencies by incorporating relays that help in forwarding the information from the source to the far users. C-NOMA systems are classified as user-relaying based C-NOMA systems, where the near user—the strong user—acts as a relay for the far user—the weak user—and, relay-assisted C-NOMA systems where a dedicated relay node is used in place of the near user to forward the signal to the far user. Relays are much suited for scenarios where the user distribution is asymmetric or unpredictable [6].
Relaying of information can be done in two ways: decode-and-forward (DF), where the near user separates far user’s signal using Successive Interference Cancellation (SIC) and relays the decoded signal after encoding it to the far user and, amplify-and-forward (AF), where the near user just amplifies the signal it receives from the source and forwards it to the far user. The noise accumulation is less in DF while the complexity of the process is less in AF. In the next subsection, we will discuss how RIS is incorporated in C-NOMA, about the system architecture, channel coefficients, phase shift matrices and performance metrics.
2.2 RIS-aided C-NOMA
We consider a downlink RIS-aided C-NOMA system consisting of a Base Station (BS), an RIS with passive reflecting elements, and two users: the near user, (acting as a DF relay), and the far user, (see Fig. 2(b)). Notions used in this paper are describes in Table 2.
The channel coefficient between any two nodes and is represented by , defined by , where is the deterministic path loss and is the small-scale fading component. For paths involving the RIS, channels are modeled as vectors. We denote the channel vector from the BS to the RIS as , the channel vector from the RIS to as , and similarly for the channel vector from to the RIS, and the channel vectors associated with the link from the RIS to , and . The direct channels are denoted by scalars (channel coefficient from BS to ), (channel coefficient from BS to ), and (channel coefficient from to ) [4, 7, 8].
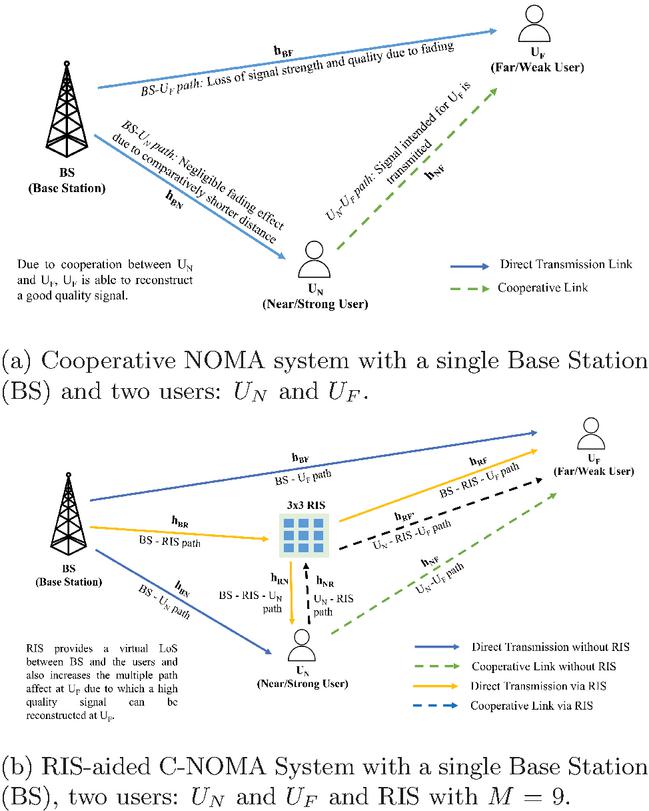
Figure 2 System model comparison.
Table 2
| Notations used in the paper | |||
| Notation | Description | Notation | Description |
| BS | Base Station | , | Near/Strong User, Far/Weak User |
| Deterministic Path Loss | Small-scale Fading Component | ||
| Superimposed signal of and | , | Signal to be sent to , Signal to be sent to | |
| Total Power with which X is transmitted from BS | Number of reflecting units in RIS | ||
| Diagonal Phase-Shift Matrix | Channel Coefficient from BS to | ||
| Channel Coefficient from BS to | Channel Coefficient from to | ||
| Channel Vector from BS to RIS | Channel Vector from RIS to | ||
| , | Channel Vector from RIS to during direct transmission phase, Channel Vector from RIS to during cooperaton phase | Channel Vector from to RIS | |
| Signal received by from BS | AWGN during transmission of signal through BS- path | ||
| Signal received by from BS | AWGN during transmission of signal through - path | ||
| Signal received by from | AWGN during transmission of signal through - path | ||
The RIS applies a diagonal phase-shift matrix [9],
| (1) |
We consider the total transmit power at the BS as . The superimposed signal is given by [10]
| (2) |
where is the power allocation factor for the near user . According to the standard NOMA power allocation constraint, the user with the better channel receives less power, meaning since is the weak user. Thus, we assume [11].
In general, there are two channel modes that can be used: half duplex (HD) and full duplex (FD) [12]. We adopt half duplex (HD) channels and divide the transmission of information into two stages: direct transmission phase and cooperation phase. Hence, transmission of information is considered to be done in two time slots. In the first time slot, which is the direct transmission phase, BS transmits to both and . In the second time slot, transmits the decoded information to [10]. Note that , where and are the deterministic path loss and the small-scale fading component respectively for RIS- path during the cooperation phase.
2.2.1 Direct transmission phase
The BS transmits . The RIS applies phase shifts to optimize the link to , where is the phase-shift matrix for BS- communication. The effective channel gain from the BS to , , accounts for both the direct and reflected paths [4, 10, 13]:
| (3) |
Without RIS, remains as only. The difference in the channel links can be clearly seen in Fig. 2.
The received signal at is
| (4) |
where is AWGN and is the noise power at .
performs SIC: it first decodes , treating as interference. The SINR for decoding at is:
| (5) |
Assuming successful decoding, removes and then decodes its own signal . The SINR for decoding at is:
| (6) |
Similarly, receives from BS via RIS. The RIS applies . The effective channel is given as,
| (7) |
Without RIS, remains as only.
The SINR for is:
| (8) |
where is AWGN and is the noise power at during direct transmission phase.
2.2.2 Cooperation phase
re-encodes the decoded and forwards it with transmit power to via RIS. The RIS applies . The effective channel is given as,
| (9) |
Without RIS, remains as only.
The received signal at is
| (10) |
where is AWGN and is the noise power at during cooperation phase.
The SINR for is:
| (11) |
2.2.3 Final SINR at
uses the simplest joint decoding technique, Selection Combining (SC), which chooses the signal with the best quality [4]:
| (12) |
2.3 Performance Metrics
To comprehensively evaluate the system performance, the following metrics are used throughout various research papers, the comparison of which is given in Table 3:
• Sum Rate (): The total achievable throughput of both users, defined as . Higher the sum rate, better is the system performance [14].
Table 3
| Comparison of review papers on RIS-aided cooperative NOMA | ||||
| Authors | Year | Title | Strengths | Limitations |
| Zhu et al. | 2024 | A review of RIS-assisted wireless communication research | Details the comparison of active and passive RIS approaches, discusses energy efficiency challenges | Lack of C-NOMA specific optimization strategies |
| Gu et al. | 2023 | On the performance of cooperative NOMA downlink: A RIS-aided D2D perspective | Analytical performance bounds, extensive simulation analysis, highlights effects of RIS in cooperative NOMA | Assumes perfect CSI, limited focus on relay diversity |
| Zhang et al. | 2021 | Reconfigurable intelligent surfaces aided multi-cell NOMA networks: A stochastic geometry model | Rigorous system modeling, stochastic geometry framework, explores large-scale deployments | Limited real-world validation, no hardware implementation results |
• Outage Probability (OP): Defined as the probability that a user’s instantaneous SINR falls below a predefined threshold : . Lower the outage probability, better is the system performance. Outage analysis is crucial in cooperative systems to quantify reliability under fading conditions [10].
• Energy Efficiency (EE): Given by the ratio of the sum rate to the total consumed power: , where denotes the power consumed by the RIS control circuitry. Higher the energy efficiency, better is the system performance [15].
3 Other 6G Enabling Technologies
6G aims to deliver unprecedented performance, characterized by peak data rates up to Terabit per second () and ultra-low latency in the range of to millisecond () for demanding real-time applications [16]. To achieve the goals, 6G development is driven by the exploration of several critical technological enablers across various domains. The New Spectrum Frontier is defined by the necessary transition to Terahertz (THz) Communication, which utilizes the extremely wide spectrum above GHz to facilitate data rates [17]. Cell-Free Massive MIMO (CF-mMIMO), for improved uniform coverage and simplified interference management [18], alongside the integration of Non-Terrestrial Networks (NTNs) [19] (such as satellites and High-Altitude Platforms (HAPs)) guarantees ubiquitous Global Coverage. Furthermore, the functions of communication and sensing are converged into Integrated Sensing and Communication (ISAC) to enable highly accurate environmental detection and localization [20]. Finally, all these architectural and functional enhancements are unified and optimized through the pervasive Integration of Artificial Intelligence (AI), moving the network toward self-management and native intelligence [21].
The focus of our paper, RIS-aided C-NOMA, operates as a critical spectral efficiency and energy efficiency layer, but its true potential is unlocked when integrated with other 6G enablers that address different facets of network performance. For example, in Terahertz (THz) communications, RIS enables focused and redirected highly directional beams, mitigating blockage issues and real-time optimization of RIS phase shifts and dynamic resource allocation in C-NOMA environments, the use of AI/ML reduces .the computational complexity and enables adaptive system performance under varying network conditions.
4 Applications of RIS-Aided C-NOMA
4.1 Massive Machine-Type Communications (mMTC)
mMTC targets connectivity for massive numbers of low-rate, sporadically active devices (sensors, smart meters) with stringent energy and overhead constraints. RIS can boost uplink SNR for cell-edge and shadowed devices, while C-NOMA enables many devices to share the same resource block and exploit cooperative relaying for reliability [22].
4.2 SWIPT and Wireless Energy Harvesting
Simultaneous wireless information and power transfer (SWIPT) is essential for batteryless or energy-constrained IoT devices. RIS can focus and steer RF energy toward energy harvesters, increasing harvested power without extra transmit power, while C-NOMA allows simultaneous energy and information delivery to multiple receivers and cooperative forwarding by stronger devices [23].
4.3 Autonomous Vehicles and V2X
Connected and autonomous vehicles require ultra-reliable, low-latency V2X communications for safety messages and cooperative perception in highly dynamic, often obstructed environments. Roadside RIS (gantries, poles) and vehicle-mounted RIS can redirect mmWave/THz beams to occluded vehicles and improve link reliability; C-NOMA supports prioritized multiplexing of safety (high priority) and non-safety traffic while cooperative relaying helps reach occluded nodes [24].
4.4 UAV/Drone Networks and Aerial Relaying
UAVs function as flexible aerial access points or relays for temporary events, disaster response, and remote coverage. UAV-mounted RIS (or ground RIS directed by UAVs) can dynamically form favorable reflection paths to reach clusters of users; combined with C-NOMA, UAVs can serve multiple users simultaneously with cooperative relaying to extend coverage [25].
4.5 Smart Cities (Dense Urban IoT and Infrastructure)
Smart city deployments mix heterogeneous devices—environmental sensors, traffic cameras, public-safety sensors—operating in urban canyons with frequent blockage and interference. Strategically deployed RIS panels on lampposts, façades, and bus stops can create controllable reflective links to mitigate dead zones; C-NOMA enables heterogeneous devices to share scarce spectrum and cooperatively forward traffic for disadvantaged nodes [26].
5 Conclusion and Future Works
The integration of RIS-aided C-NOMA provides a transformative approach to 6G, significantly enhancing spectral efficiency and signal reliability while reducing power consumption and extending network coverage. Despite the advantages, there are major critical research challenges that include:
• Difficulty of Channel Estimation and handling Imperfect CSI,
• The complex Joint Non-Convex Optimization of power, pairing, and RIS phases,
• Hardware Constraints (like quantized phase shifts) and Modeling Gaps limit theoretical gains.
We outline promising potential solutions and research directions in order to mitigate these challenges. Potential solutions identified in the literature include advanced channel estimation methods, such as compressive sensing and deep learning techniques that could efficiently exploit channel sparsity and reduce pilot overhead [8, 27]. Typically, optimization of RIS-aided C-NOMA systems is addressed by alternating optimization and successive convex approximation [9, 10], besides deep reinforcement learning for adaptive resource allocation in dynamic environments [26]. In order to bridge the gap between theoretical models and their practical deployment, several recent contributions underline the importance of quantized phase shift optimization and detailed hardware modeling [5], while very low-complexity and scalable RIS architectures have been evaluated for practical scenarios [4].
References
[1] M. Abd-Elnaby, G. G. Sedhom, E.-S. M. El-Rabaie, and M. Elwekeil, “NOMA for 5G and beyond: literature review and novel trends,” Wireless Networks, vol. 29, no. 4, pp. 1629–1653, 2023.
[2] A. Amhaz, M. Elhattab, C. Assi, and S. Sharafeddine, “Integrated sensing and communication: NOMA vs cooperative NOMA,” in GLOBECOM 2023-2023 IEEE Global Communications Conference, pp. 407–412, IEEE, 2023.
[3] U. Mushtaq and S. Baig, “Resource Allocation in Cooperative NOMA: Opportunities and Challenges,” in 2024 3rd International Conference on Emerging Trends in Electrical, Control, and Telecommunication Engineering (ETECTE), pp. 1–6, IEEE, 2024.
[4] X. Gu, G. Zhang, B. Zhuo, W. Duan, J. Wang, M. Wen, and P.-H. Ho, “On the performance of cooperative NOMA downlink: A RIS-aided D2D perspective,” IEEE Transactions on Cognitive Communications and Networking, vol. 9, no. 6, pp. 1610–1624, 2023.
[5] Z. Zhu, “A review of RIS-assisted wireless communication research,” Applied and Computational Engineering, vol. 88, pp. 158–165, 2024.
[6] S. Sharma, A. K. Mishra, M. H. Kumar, K. Deka, and V. Bhatia, “Intelligent reflecting surfaces (IRS)-enhanced cooperative NOMA: A contemporary review,” IEEE Access, vol. 12, pp. 82168–82191, 2024.
[7] L. Wei, C. Huang, G. C. Alexandropoulos, C. Yuen, Z. Zhang, and M. Debbah, “Channel estimation for RIS-empowered multi-user MISO wireless communications,” IEEE Transactions on Communications, vol. 69, no. 6, pp. 4144–4157, 2021.
[8] A. Taha, M. Alrabeiah, and A. Alkhateeb, “Enabling large intelligent surfaces with compressive sensing and deep learning,” IEEE access, vol. 9, pp. 44304–44321, 2021.
[9] T. Bai, C. Pan, Y. Deng, M. Elkashlan, A. Nallanathan, and L. Hanzo, “Latency minimization for intelligent reflecting surface aided mobile edge computing,” IEEE Journal on Selected Areas in Communications, vol. 38, no. 11, pp. 2666–2682, 2020.
[10] K.-T. Nguyen, T.-H. Vu, and S. Kim, “A unified framework analysis for reconfigurable intelligent surface-aided coordinated NOMA systems,” IEEE Transactions on Vehicular Technology, vol. 72, no. 11, pp. 15115–15120, 2023.
[11] J. A. Oviedo and H. R. Sadjadpour, “A fair power allocation approach to NOMA in multiuser SISO systems,” IEEE Transactions on Vehicular Technology, vol. 66, no. 9, pp. 7974–7985, 2017.
[12] A. Muhammad, M. Elhattab, M. A. Arfaoui, and C. Assi, “Optimizing age of information in RIS-empowered uplink cooperative NOMA networks,” IEEE Transactions on Network and Service Management, vol. 21, no. 1, pp. 897–907, 2023.
[13] J. Ren, X. Lei, Z. Peng, X. Tang, and O. A. Dobre, “RIS-assisted cooperative NOMA with SWIPT,” IEEE Wireless Communications Letters, vol. 12, no. 3, pp. 446–450, 2022.
[14] P. Dinh, M. A. Arfaoui, S. Sharafeddine, C. Assi, and A. Ghrayeb, “A low-complexity approach for sum-rate maximization in cooperative NOMA enhanced cellular networks,” in 2020 IEEE international conference on communications workshops (ICC Workshops), pp. 1–7, IEEE, 2020.
[15] Q. Zhai, L. Dong, C. Liu, Y. Li, and W. Cheng, “Resource management for active RIS aided multi-cluster SWIPT cooperative NOMA networks,” IEEE Transactions on Network and Service Management, vol. 21, no. 4, pp. 4421–4434, 2024.
[16] V. K. Quy, A. Chehri, N. M. Quy, N. D. Han, and N. T. Ban, “Innovative trends in the 6G era: A comprehensive survey of architecture, applications, technologies, and challenges,” IEEE Access, vol. 11, pp. 39824–39844, 2023.
[17] W. Jiang, Q. Zhou, J. He, M. A. Habibi, S. Melnyk, M. El-Absi, B. Han, M. Di Renzo, H. D. Schotten, F.-L. Luo, et al., “Terahertz communications and sensing for 6G and beyond: A comprehensive review,” IEEE Communications Surveys & Tutorials, vol. 26, no. 4, pp. 2326–2381, 2024.
[18] N. Ahmadi and G. Akbarizadeh, “Optimizing Power Control in Cellular and Cell-Free Massive MIMO Systems: A SVM/RBF Approach,” IEEE Access, 2025.
[19] A. Guidotti, A. Vanelli-Coralli, M. El Jaafari, N. Chuberre, J. Puttonen, V. Schena, G. Rinelli, and S. Cioni, “Role and evolution of non-terrestrial networks toward 6G systems,” IEEE Access, vol. 12, pp. 55945–55963, 2024.
[20] A. Cengiz and Y. Kabalci, “Towards Unified Wireless Systems: ISAC Technologies in the 6G Era,” in 2025 7th Global Power, Energy and Communication Conference (GPECOM), pp. 1026–1031, IEEE, 2025.
[21] A. Alhammadi, I. Shayea, A. A. El-Saleh, M. H. Azmi, Z. H. Ismail, L. Kouhalvandi, and S. A. Saad, “Artificial intelligence in 6G wireless networks: Opportunities, applications, and challenges,” International Journal of Intelligent Systems, vol. 2024, no. 1, p. 8845070, 2024.
[22] S. Liesegang, A. Zappone, O. Munoz, and A. Pascual-Iserte, “Rate optimization for RIS-aided mMTC networks in the finite blocklength regime,” IEEE Communications Letters, vol. 27, no. 3, pp. 921–925, 2022.
[23] Z. Yang, L. Xia, J. Cui, Z. Dong, and Z. Ding, “Delay and energy minimization for cooperative NOMA-MEC networks with SWIPT aided by RIS,” IEEE Transactions on Vehicular Technology, vol. 73, no. 4, pp. 5321–5334, 2023.
[24] M. Deng, M. Ahmed, A. Wahid, A. A. Soofi, W. U. Khan, F. Xu, M. Asif, and Z. Han, “Reconfigurable intelligent surfaces enabled vehicular communications: A comprehensive survey of recent advances and future challenges,” IEEE Transactions on Intelligent Vehicles, 2024.
[25] N. Rahmatov and H. Baek, “RIS-carried UAV communication: Current research, challenges, and future trends,” ICT express, vol. 9, no. 5, pp. 961–973, 2023.
[26] Y. Zou, Y. Liu, X. Mu, X. Zhang, Y. Liu, and C. Yuen, “Machine learning in RIS-assisted NOMA IoT networks,” IEEE Internet of Things Journal, vol. 10, no. 22, pp. 19427–19440, 2023.
[27] Y. Cao, C. Xing, Y. Wu, J. An, D. W. K. Ng, and X.-G. Xia, “RIS-Assisted Massive Access With Semi-Passive Elements,” IEEE Transactions on Wireless Communications, vol. 23, no. 9, pp. 10546–10561, 2024.
Biographies

M. Ramadevi received the B.Tech degree in ECE from JNTUH and M. Tech degree in Embedded Systems from VNRVJIET. Currently, an Assistant Professor in VNRVJIET, Hyderabad. and Ph.D. candidate at NIT Warangal. Research interests: cooperative NOMA, wireless communications.

Manunuru Naga Sree Lekha is a B.Tech ECE student at VNR VJIET, Hyderabad. Interest in communication systems and space science; member of IEEE, IUCEE, and IETE student chapters. Published a paper in January 2025.

V. Phanitha Sree is a B.Tech ECE student at VNR VJIET, Hyderabad. Proficient in programming and technical tools; participated in hackathons and team projects; Chair of IEEE MTT-S division of the college.

Madha Sai Prashanth Goud is a B.Tech ECE student at VNR VJIET, Hyderabad. Skilled in C, Python, MATLAB, VLSI/PCB design, and signal processing; completed internship in CNN optimization.